About me
Arunkumar Rathinam is currently works as a Research Associate at SnT, Interdisciplinary Center for Security, Reliability and Trust, University of Luxembourg. He is a member of the Computer Vision, Imaging and Machine Intelligence Research Group (CVI2) leading multiple Space projects and SPARK challenge activities . His research areas are vision-based spacecraft navigation, deep learning-based pose estimation and neuromorphic vision. He received his PhD degree from the UNSW, Sydney in 2019. His PhD was on developing SLAM approaches for an orbiting spacecraft around an asteroid to achieve autonomous mapping and navigation. Before joining SnT, he worked as a Research Associate at the Surrey Space Center, University of Surrey, UK.
- Vision-based Navigation
- Space Robotics
- Deep learning
PhD in Space Robotics, 2019
UNSW (Australia)
MSc in Space Science and Technology, 2015
University of Würzburg (Germany)
BE in Mechanical Engineering, 2007
Anna University (India)
Latest News
- [Feb 20, 2024] I’ll co-organize the third edition of SPARK challenge as part of the AI4Space workshop, in conjunction with the CVPR 2024.
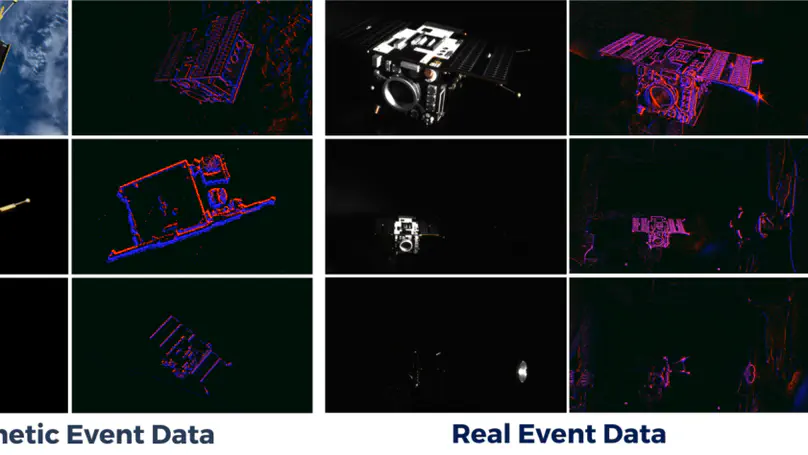
- [Feb 8, 2024] Our recent dataset paper SPADES: A Realistic Spacecraft Pose Estimation Dataset using Event Sensing has been accepted at the 2024 ICRA, May 13-17, Yokohama, Japan.
- [Oct 15, 2023] I’ll present about Opportunities and Challenges in Deep Learning-based Spacecraft Pose Estimation for Future In-orbit Servicing missions at ESA CleanSpace Industry days
- [Aug 10, 2023] Our survey article Deep Learning-Based Monocular Spacecraft Pose Estimation: Current State, Limitations and Prospects has been accepted for publication in Acta Astronautica.
- [July 10, 2023] Our Machine learning experiment AI4SPACE launched into orbit successfully link